时间: 2021-07-30 10:20:44 人气: 12 评论: 0

本篇文主要关注基于工作任务的商用机器人(如安防机器人和物流外卖机器人)
这篇文章**介绍基本的HRI(人-机器人交互)模型中重要的设计概念。看上去有些数学公式,但其实并不晦涩,笔者已经将一整套知识抽丝剥茧。只要跟着内容读下去,相信收获**很大。
能够进行各种任务而无需人为干预的自主机器人是最终的边际目标。具体来讲,我们对机器人真正想要的是:当我们有需求时候机器人能够完成我们期望的任务,而不是他们主动地完成任何他们想要的东西。我们对能代生命形式这种机器人不感兴趣,我们对能帮我萌做事情的努力感兴趣。所以,在真正的AI出来之前。我们在技术边界内设计机器人的实际且有意义的目的是:通过机器人能自动能力来杠杆人类的注意力(劳动力)
因此,在本文中我们提出了七个概念用来评估如果机器人是否够高效的指标,以指导人机交互的设计,他们是:
任务完成力是对任务实际执行情况的一个衡量标准。不同任务类型的机器人有不同的任务完成力。比如:
对于物流机器人在驾驶和导航的任务下,我们认为任务完成力是“从A点到B点所需的时间”。
在楼内服务机器人的搜索任务中,我们可以测量找到所有目标或在给定时间内发现的目标数量的时间。
在安防机器人的攻击任务中,我们可能需要测量目标被破坏和损失。
对于设计团队和产品经理来讲,评估机器人交互的第一步就是先确定核心任务,并根据最核心的任务设计出评估指标(任务完成力)。
独立时长是当机器人被用户忽略时,机器人执行任务的能力随着时间的推移而下降的程度。 通常情况下,任务完成力(Effectiveness)和时间(Time)之间存在下图的特征曲线。
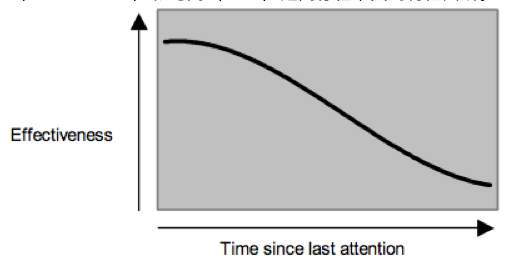
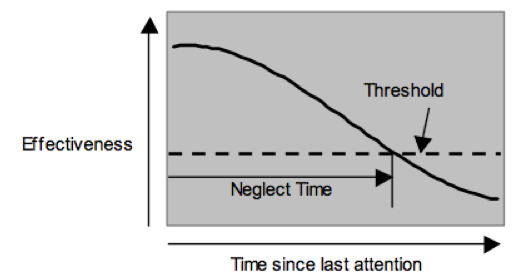
该曲线显示,机器人当前的任务完成力随着用户上次注意机器人的时间而下降。例如:对于开放空间的导航问题,我们可以将当前任务完成力定义为机器人朝着目标迈进的速度。随着用户忽视它的时间越久,自主前进的能力就**越差。 我们定义,机器人可以完成任务下的最低任务完成力为阈值(Treshold),便得到如下曲线。
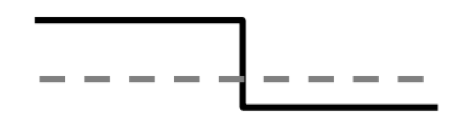
在一些情况下,简单机器人的任务完成力随着时间的下降并不是渐变的而是“完全能”与“完全不能”这二者之间0和1的关系,因此曲线变为下图,(但是并不影响后续的模型分析。因为如果我们假设机器人出现故障的几率复合高斯分布,则整体来看,多机器人团队的情况下,整体机器人的效能仍然**附和上图的渐变曲线)
这个指标比较简单,以巡逻机器人为例子,在一个复杂道路,行人较多的环降下巡逻就**面临高任务复杂度。在一个封闭场合,路障较少的情况下巡逻,任务复杂度就**较低。 在实际任务场景中,传感器错误,或其他车辆障碍物,以及不平坦地形都可能导致任务的复杂性增加。
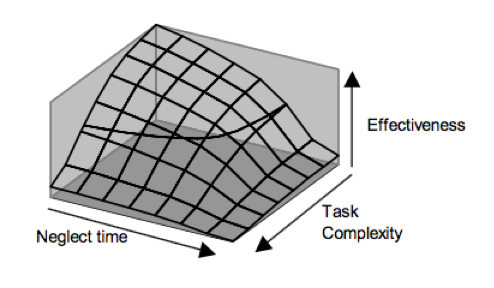
当引入任务复杂度这个概念后,我们**发现单独评估独立时间是没有意义的,于是我们引入“独立能力”这个概念,见下图中“独立能力”的曲线。(如果一个机器人团队的技术较好,如环境感知能力强,机械结构不易宕机,轮式自控覆盖路形广。则可以有效提高机器人的“独立能力”。
对于产品经理和设计师来说,如何在团队的技术能力边界内有效的利用“独立能力”完成更多的复杂任务是需要着重考虑的。
由于我们设计机器人的目的是“杠杆人类用户的注意力”,那么就需要引入“注意力效力”的概念。
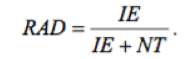
注意力成本=交互成本/(交互成本+独立能力)
*其中“交互成本”,简单来说是用户为了让机器人继续完成任务,每次在机器人的“任务完成力”降低到阈值以下,对机器人进行的辅助操作或任务修正时的操作成本,也就是交互所需的时间。
对于注意力效力RAD可以理解为,为了完成一个任务,用户对机器人的管理成本的性价比。
简单来说,自由时间=1.0 – 注意力效力
![]()
后续**引用此指标。
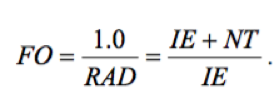
杠杆倍数=1.0 / 注意力效力 =( 交互成本+独立能力 ) / 交互成本
在实际场景中,如果为了更好的“杠杆”用户的人力,则一个用户同时操作多个机器人是重要的“人-机器人协作”模式。这种人-机器人团队的模式大大提升了人的能力。整体上,为了增加“杠杆倍数FO”,设计师和产品经理需要想尽办法减小“交互时间”,或想尽办法增大“独立时间”
例如,在巡逻任务时,机器人对危险情况判断的越准确,则机器人的“独立能力”越强;当机器人遇到多传感器输入时,如果系统更懂用户所需哪种信息,第一时间回传用户最所需的信息,则“交互成本”**被降低。类似,如果机器人能在用户做判断时给出辅助决策的建议或选项,则“交互成本”也**被降低。 这些目的都是为了增加用户的“注意力效力”,从而增加机器人对人类用户的“杠杆倍数”,简单来说,就是让一个用户可以更高效的支配管理更多的机器人的团队。
在实际情况下,当用户可以同时支配和管理更到的机器人,则团队整体的“任务完成力”就越高。但实际情况下。一个用户操作的机器人带来的“任务完成力”与团队里“机器人数量”呈现下图关系。
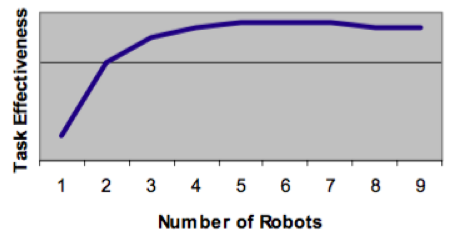
实际情况下,即使**上一个用户可以支配管理N个机器人,但是当机器人数量较多时,机器人团队的整体任务完成力就**达到饱和。因此现实的约束使得用户不可能支配管理更多的机器人承担当前的任务。这个约束是有很多现实原因的,包括物理限制与用户认知限制。下篇文章**具体分析如何提升这些限制。(重要干货)
通常情况下,任务饱和可能出现两个原因:
任务过于简单:当任务很简单时,可能**发生这样的事情,即将很多机器人在工作,团队的性能也不**提高。例如,在一个很小的园区里的巡逻任务,并不需要很多的机器人跑来跑去。换句话说就是,任务空间太拥挤。机器人所能收集和感知的信息大部分重叠。甚至**相互阻挡,造成拥堵。(解决此问题需要产品经理更充分地理解商业场景)
用户的认知限制:主要是记忆。在控制多个机器人时,人类必须记住机器人状态信息,界面模式,机器人能力等。这就要求工作记忆,因为只有有限数量的信息可以存储在用户的短期记忆中。(解决此问题需要用户研究人员更深入地理解终端用户的使用习惯交,需要互设计师设计更好的信息结构展示形式和结构)
为了提升机器人的商业价值(对人力的杠杆力):设计师和产品经理需要主要考虑如何提升“独立能力NT”和降低“交互成本IE”从而有效提升“注意力效力”。
与此同时,需要产品经理更好的洞察现实的商业场景,找到最能体验机器人任务能力的“任务复杂度”。
类似的,设计师需要更好的理解用户的使用习惯,从而在用户有限的交互认知能力下解决“任务饱和”的情况。
后续文章给出建议和具体设计方案来达到上述目的。
本篇文章是系列文章“AI机器人交互设计模型(被CMU和NASA多次引用)”的第一篇。本系列文章部分借鉴Olsen与Goodrich的经典论文“Metrics for Evaluating Human-Robot Interactions” 以及Scholtz 的“Theory an Evaluation of Human Robot Interaction”.笔者是欧盟创新技术院HCI专业,最近在创业做低速自动驾驶。在读CMU和NASA的文章时发现这**论文被多次引用提及。仔细研究后发现字字干货,于是吸收整理后输出给大家。
本文由 @石大大 原创发布于人人都是产品经理。未经许可,禁止转载。